

Designed by Bruce Shapiro , The Sisyphus Table is Kinetic art, technology and design merged in stunning meditative beauty. Take a look at the complete story below.
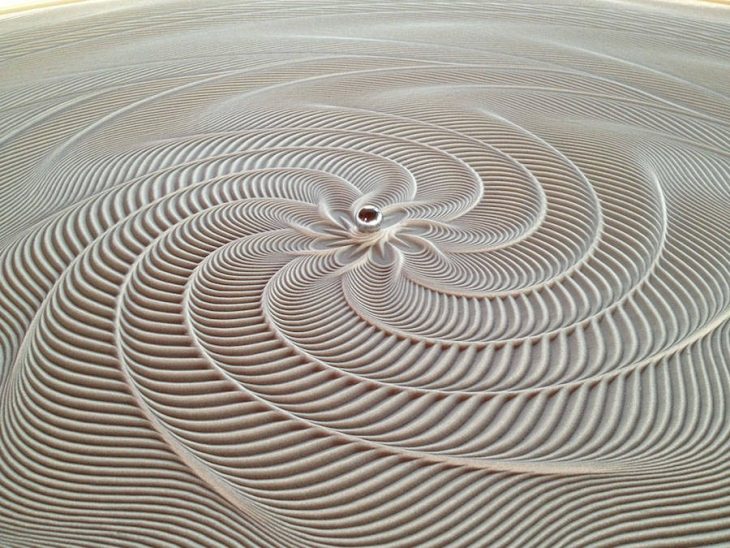




In Greek mythology, Sisyphus was condemned to roll a boulder up a mountain for all eternity. In my art, Sisyphus is a kinetic sculpture that rolls a ball through sand, forever creating and erasing beautiful patterns. Watching Sisyphus evokes a meditative feeling.
I have been creating Sisyphus sculptures for nearly 20 years, and have 3-meter diameter permanent installations in Switzerland, Germany and Australia. Over time I have come to view Sisyphus as more than a kinetic art piece: it is an instrument. As a musical instrument plays songs, Sisyphus plays paths. My goal with this Kickstarter is to get Sisyphus into people’s homes for them to enjoy as both furniture and art, but also, to inspire a community of composers to write “music” for it.
End Table: Sisyphus kinetic sculpture within 2 foot diameter x 22″ tall, tempered glass-topped metal table (exact size may vary). Stepper motor driven Sisbot mechanism. Metal furniture with wood veneer options for top and sides – birch/maple, walnut, black. Some assembly required.
3 foot coffee table: Sisyphus kinetic sculpture within 3 foot diameter x 18″ tall, tempered glass-topped metal table (exact size may vary). Stepper motor driven Sisbot mechanism. Metal furniture with wood veneer options for top and sides – birch/maple, walnut, black. Some assembly required.
Hardwood 4′ coffee table: Sisyphus kinetic sculpture within 4 foot diameter x 18″ tall, tempered glass-topped all wood table. Brushless servo driven Sisbot mechanism. ApplePly base and choice of hardwood furniture – maple, walnut, padauk – all CNC machined and hand finished. All components including servo motors made in the U.S. except circuit boards.
How does it work? (simple version)
What you see is a fully functional table with a thin layer of sand under its glass top. Under the table is a two-motor robot (the “Sisbot”) that moves a magnet which draws a steel ball through the sand. The motors are controlled by a small Raspberry Pi computer which plays a set of path files, much like a music player plays an mp3 file. Sisyphus has no on/off switch; you simply plug it in and it automatically calibrates itself, loads a default playlist of paths, and begins playing. You can control playback – choosing favorite tracks or playlists – speed of play, and table-lighting from a mobile app or by using any browser to connect to Sisyphus with WiFi.
How it works (Technical Details)
Hardware overview – All Sisbots are two axis, polar plotters. The smaller versions (for sand fields < 40″ diameter) are stepper-actuated, using Trinamic drivers. Brushless servomotors / drives are used for larger versions. High-level control is done by using code written in NodeJS, running on a Raspberry Pi 3. This includes both high-level motion control routines, file handling, and serving a two-way WiFi interface. Low-level motion control is handled by the SisBotBoard (SBB), designed by embedded systems engineer Brian Schmalz (designer of the EiBotBoard (EBB) for Eggbot). Point-to-point commands are streamed from the Pi to the SBB over serial USB, and the SBB does the low-level timed generation of step / direction signals that govern the motors. Software dimmable white LED lighting surrounds the sandfield. Power is provided by a 12VDC universal switching supply for both the LED’s and Sisbot. A single AC power cord plugs in to a standard outlet (total power consumption
Software overview – At the lowest level, the SBB runs a custom version of the EBB firmware, and conforms to the EBB command syntax. NodeJS code on the RPi will be freely upgradable, as it evolves. Routines for converting standard vector file formats (AI and DXF) will be freely downloadable. Algorithmic tools for composing paths are under development.
The Sisyphus path-file format consists of a text file containing an ordered list of 2-axis vertices, with each line containing the polar coordinates of a point on the unit circle. Paths saved in this format will play on any size Sisyphus (they are scaled appropriately by the software). Designs can be easily translated from traditional Cartesian x-y coordinates.

